Эдди Йохан, 11-летний ученик из e@Robotclub, при поддержке своего учителя Энчика Росси, представил проект подъёмного крана, который он собрал из набора ROBOTIS Dream.
Это подъёмный кран с неизменяемой геометрией, с широкой и устойчивой подставкой снизу – первый проект Эдди, который он представил на STEAM CUP.Управление осуществляется с помощью трёх-позиционного переключателя из комплекта ROBOTIS DREAM, который позволяет поднимать и опускать предметы, подвешенные на нитке с помощью крюка.
Проект, хоть и кажется простым, обладает большим потенциалом.
Учитывая, что это первая модель Эдди, скорее всего она является лишь началом чего-то большего.
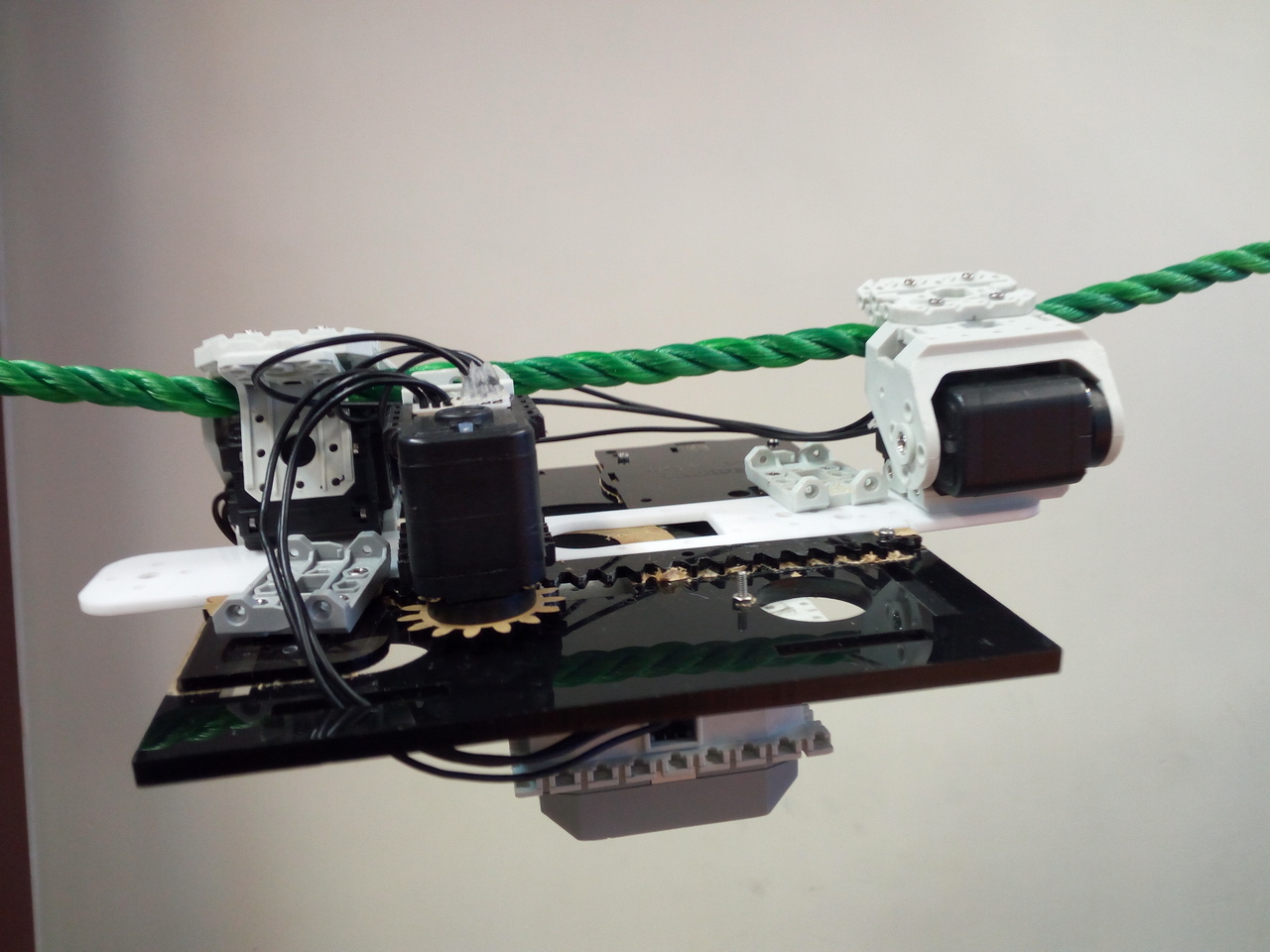
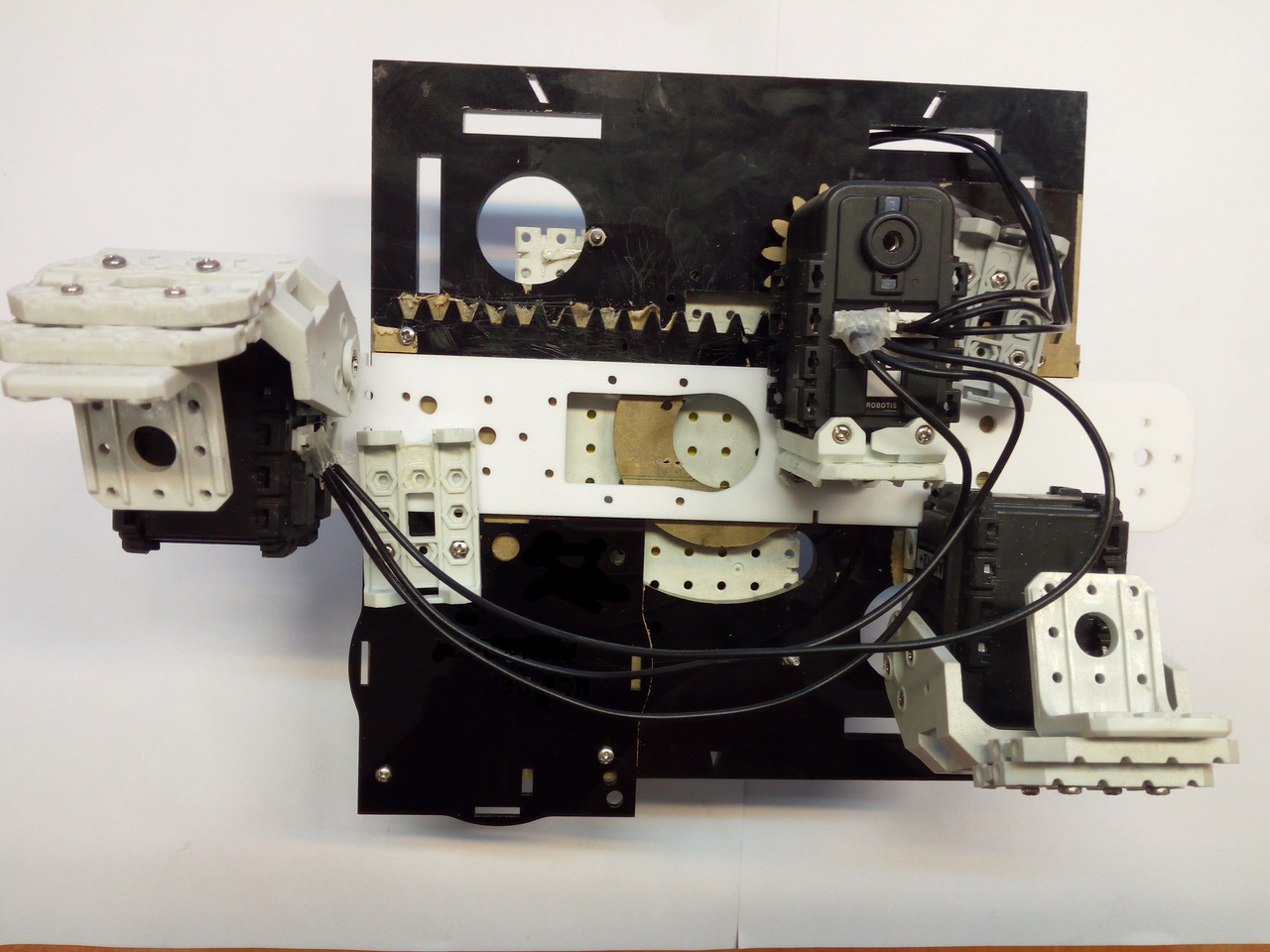
Проект-победитель за декабрь 2016 года «Rope Climbing Robot».
Это проект двух друзей, Борна Рохани и Амирхусейна Роуханди.
Они проходят обучение по программе обучающей робототехники в PishRobot’s Educational Center.
Их проект -это робот, который может перемещаться по натянутому канату в обе стороны.
В проекте были использован один контроллер ROBOTIS CM-5, три сервопривода ROBOTIS Dynamixel AX-12, аккумулятор из набора ROBOTIS STEM, два F3-кронштейна из набора ROBOTIS STEM, а также другие самодельные и пластиковые части.
Борн работал над механической конструкцией, а Амирхусейн занимался вопросами программирования.
Робот имеет возможность как ручного управления с помощью клавиш на контроллере, а также может быть полностью автономным.
В ручном режиме робот начинает двигаться при нажатии кнопки U на контроллере, его захваты открываются и закрываются с помощью клавиш L и R, остановка движения осуществляется с помощью клавиши D.
В автономном режиме робот будет руководствоваться программой, которая будет загружена в контроллер.
По сути, это платформа, на свободных местах которой можно установить различные датчики и инструменты.
Прототип этой модели может быть очень полезен в реальной жизни. Ему можно найти массу применений, начиная от перемещения грузов в узких местах, где использование другой техники затруднительно, либо совсем невозможно, до разведки труднодоступных мест.
Проект вращающегося НЛО был представлен в Индонезии. Для проекта были использованы детали из набора Robotis Dream и контроллер CM-150.
На площадке закреплён программируемый контроллер, два сервопривода и аккумулятор. На оси сервопривода через фланец закреплена модель НЛО. Второй сервопривод не задействован.
Особенностью этого проекта является то, что скорость вращения НЛО непостоянна и изменяется время от времени. Это было достигнуто за счёт использования программируемого контроллера СМ-150, в который была загружена необходимая прошивка.
Таким образом, ученик из набора Robotis DREAM собрал интересную подвижную конструкцию, которая может заполнить пустующее место на рабочем столе
Проект вращающегося ножа для резки бумаги был представлен учеником из Испании. При конструировании робота были использованы детали из набора Robotis Dream.
Модель выглядит следующим образом: на неподвижном основании, состоящем из двух соединенных пластин, установлено поворотное крепление с установленным на нем сервоприводом. На оси вращения сервопривода закреплена шестеренка, имитирующая дисковый резак. Вращаясь, шестеренка разрезает полоску бумаги без особых проблем.
Дальнейшая модернизация проекта, например, замена шестеренки с крупными зубьями на шестеренку с мелкими и часто расположенными зубьями, заметно повысит производительность этой машины.
Робот-маляр был сконструирован учащимся из кружка робототехники Erobotclub, расположенного в Малайзии. Робот оснащен контроллером CM-150 из набора ROBOTIS Dream со встроенным микрофоном и тремя ИК-датчиками. Наличие микрофона делает возможным звуковое управление: робот начинает покрасочные работы по хлопку. ИК-датчик позволяет роботу не сталкиваться с препятствиями на его пути. Кисть перемещается в двух плоскостях за счет использования двух сервоприводов. Подобные роботы в будущем могли бы сильно облегчить выполнение покрасочных работ, особенно в случае больших площадей, таких как торговые и бизнес центры.
Учащийся кружка робототехники расположенного в Индонезии сконструировал автоматизированную сортировочную линию на базе набора ROBOTIS Dream. Модель выглядит следующим образом: на неподвижном основании установлен ленточный транспортер, приводимый в движение сервоприводом и оснащенный датчиком цвета, а рядом с транспортером собран сортировочный механизм карусельного типа, также приводимый в движение сервоприводом. Управляет всем процессом контроллер CM-150. Подобные сортировочные линии применяются при сортировке ягод и фруктов и позволяют с высокой скоростью отбирать только спелые плоды.
Учащийся кружка робототехники Erobotclub, расположенного в Малайзии, сконструировал настольного робота способного доставлять пишущие инструменты, такие как ручки и карандаши. Робот собран из набора ROBOTIS Dream и представляет собой пластину-держатель установленную на колесной платформе. Робот оснащен системой звукового управления, позволяющей ему двигаться в различных направлениях в зависимости от числа хлопков. Такой функционал стал возможен за счет использования контроллера CM-150 со встроенным микрофоном. Имея такого робота у себя на столе можно избавить себя от необходимости в очередной раз вставать со стула и тянуться за ручкой или карандашом, достаточно просто весело похлопать в ладоши и робот доставит необходимые предметы прямо к вам в руки.
Учащиеся центра дополнительного образования из г. Сурабая, Индонезия сконструировали автоматизированную сортировочную линию на базе набора ROBOTIS OLLO. Линия состоит из основания на котором установлен ленточный транспортер приводящийся в движение электромотором. Сортировка объектов происходит на основании показаний ИК-датчика, установленного напротив транспортера. Объекты превышающие определенный размер считаются браком и перемещаются в специальный контейнер. За позиционирование сортировочного механизма отвечает сервопривод.
Учащиеся старшей школы из г. Тегеран, Иран в рамках подготовки к международным соревнованиям RoboCup Junior Rescue Challenge создали робота-спасателя на базе набора ROBOTIS Bioloid. Управляющая программа для робота написана в среде программирования RoboPlus. Данный робот имеет колесное шасси, на котором установлен контроллер CM-5 с платой расширения управляющий движением робота, несколько УЗ-дальномеров позволяющих роботу двигаться вдоль стен и обнаруживать объекты перед собой, пара ИК-датчиков позволяющих роботу двигаться вдоль маршрутной линии, а также двухзвенный манипулятор предназначенный для захвата объектов. Все подвижные элементы робота управляются сервоприводами Dynamixel AX-12A.
Десятилетний Кэн изучающий робототехнику в STEM-центре в г. Хошимин, Вьетнам сконструировал модель автоматизированного контрольно-пропускного пункта с системой звуковой идентификации на базе набора ROBOTIS Dream Level 2. Модель представляет собой неподвижное основание на котором установлен программируемый микроконтроллер ROBOTIS CM-150 со встроенным микрофоном и ИК-датчиками, аккумулятор и два сервопривода, приводящие в движение ворота. Ворота открываются автоматически при введении звукового пароля, а именно после определенного количества хлопков в ладоши, которые подсчитываются с помощью микрофона. Закрытие ворот также происходит автоматически после прохождения АКПП, что регистрируется с помощью ИК-датчика. Дополнительно в модели предусмотрена блокировка ворот после многократно введенного некорректного пароля.