Человек склонен к привыканию. Мы привыкаем к звукам будильника, как только раздражитель становится знакомым, мозг формирует команду “не реагировать”. И мы спокойно спим дальше.
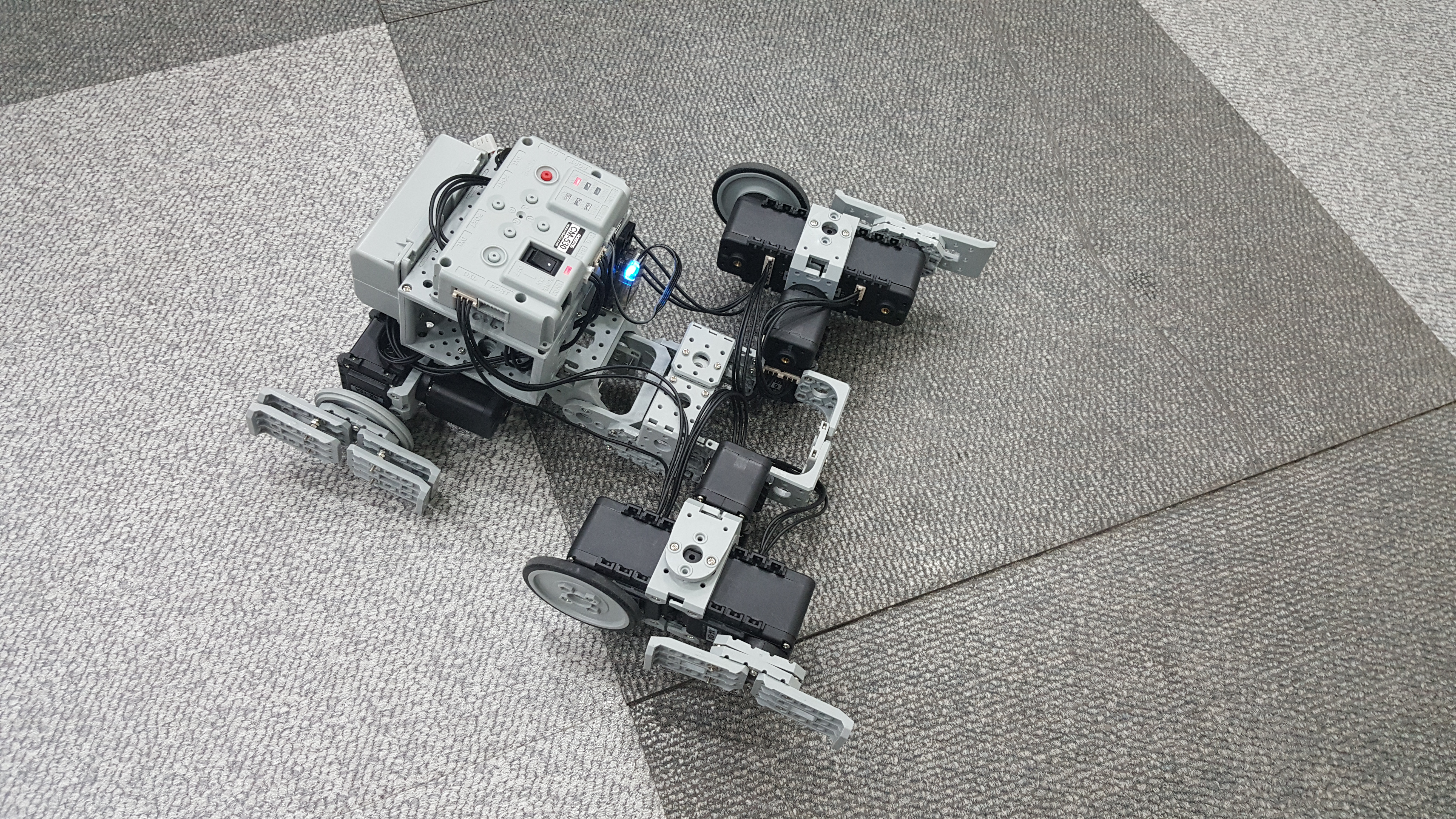
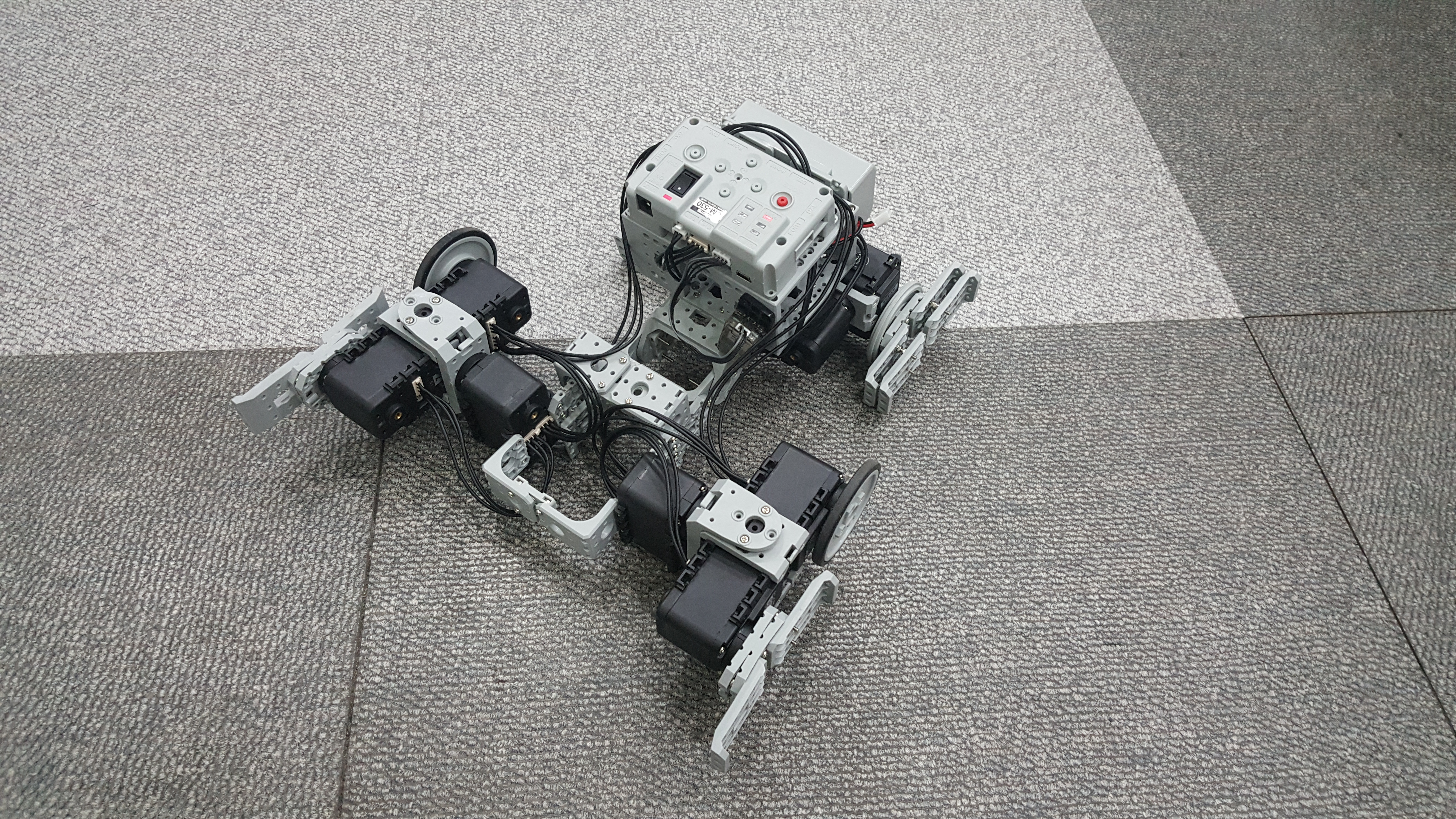
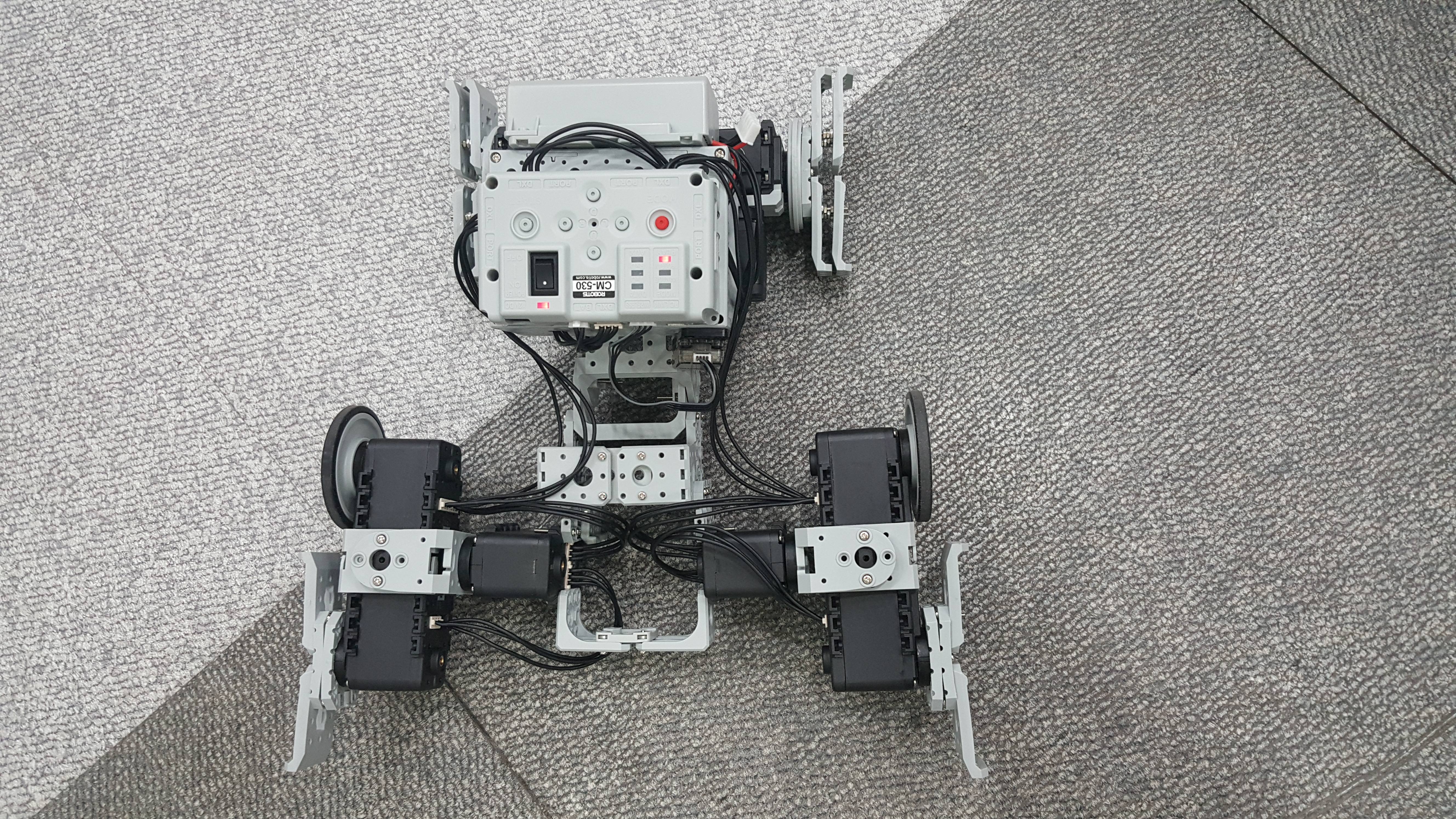
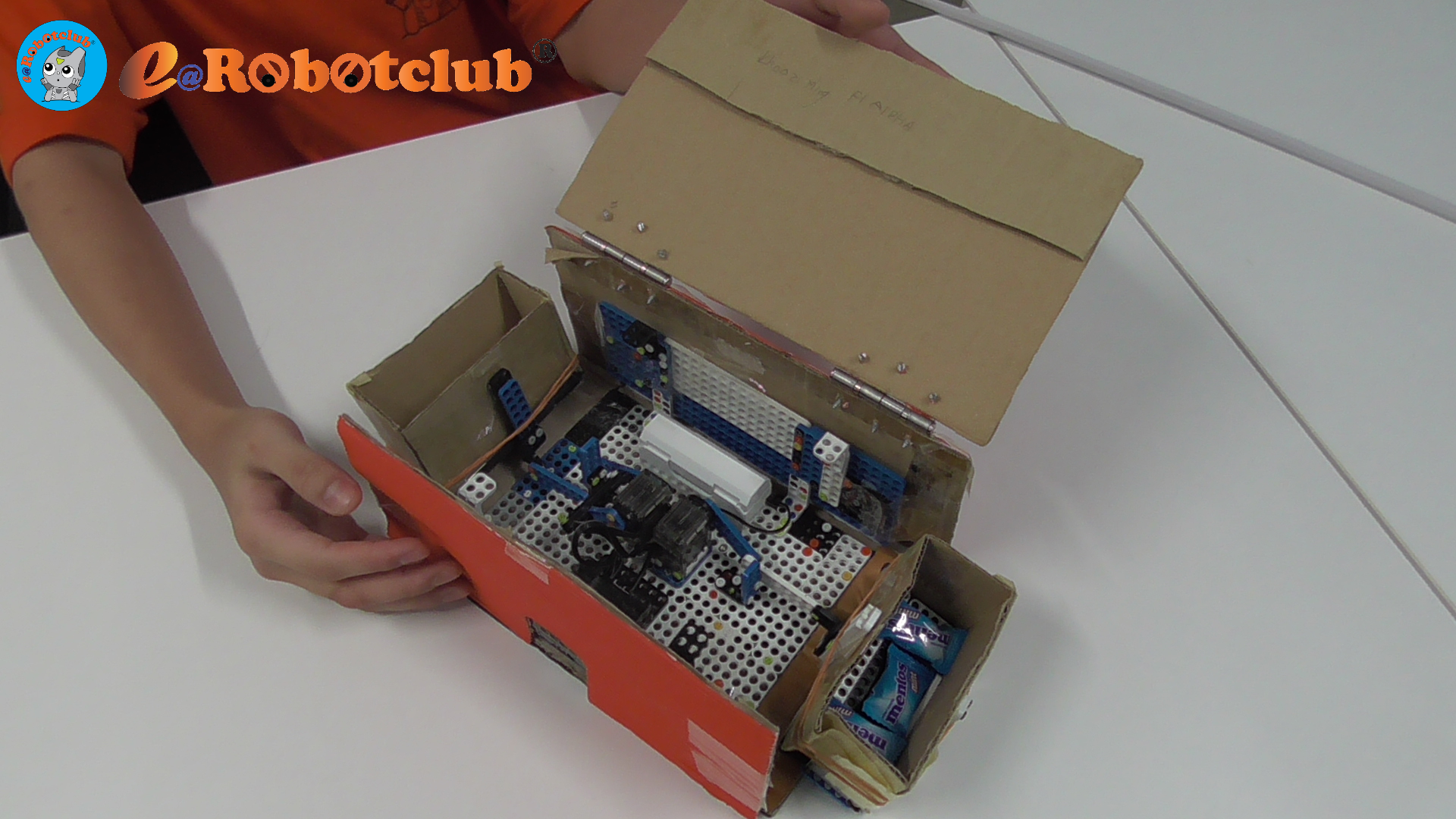
Исследовав данный вопрос, ученик Yau Kai Jie из robotclub_malaysia решил создать робота – барабанщика на основе робототехнического набора ROBOTIS Dream Kit.
Пользователь ставит телефон в специальный отсек, собранный из пластин и заклепок. Как только на телефоне звучит мелодия (будильник), датчик на микроконтроллере см-150 улавливает звук, в результате чего палочки (пластины), присоединенные к 2 сервоприводам, во время движения начинают стучать по столу, создавая стук, от которого человек просыпается.
Данная модель робота будет настоящим помощником для всей семьи.