Компания KONDO KAGAKU CO. LTD. анонсировала новую серию роботов KXR:
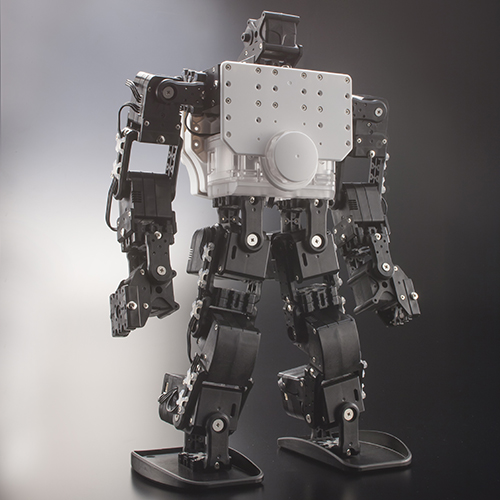
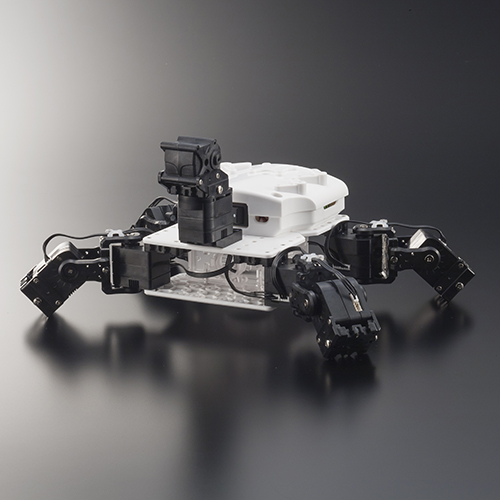
Двуногий робот KXR-L2 и KXR-L4-R – робот-черепаха, которые будут выпущены на рынок в январе или февраля 2017, то есть можно сказать, на днях.
Концепция серии KXR
Серия KXR состоит из сервомоторов с двумя видами спецификации. Они поддерживают использование сменных деталей, которые свободно заменяются в зависимости от назначения, эпоксидную рамку с деталями более 30 видов, которые легко и уверенно можно собрать в необходимую конструкцию, а также пульт управления и ПО.
Что касается набора роботов, то они поставляются в стандартной упаковке компании CONDO.
Интересный факт: если добавить некоторые детали в набор KXR-L4-R, то можно собрать прямоходящего андроидного робота.
Во всей серии KXR можно легко переставлять каждый комплект на другой тип робота, используя множество деталей, которые являются универсальными.
Также, в продаже можно найти много дополнительных полезных деталей, таких как аппарат управления по радио-каналу и различные датчики. Поэтому можно легко собрать своего уникального робота, используя серию KXR.
Компания CONDO является ведущей компанией, которая выпускает роботов для хобби и новый робот является третьим продуктом этой компании. Первый робот для хобби, KHR-1 разработан и выпущен на рынок в 2004 году. Второй, KHR-2HV в 2006 и KHR-3HV в 2009 году.
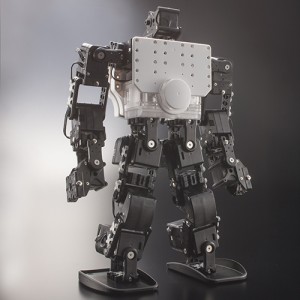
Технические характеристики KXR-2L:
Части рамы из эпоксидной смолы;
Контрольная панель: RCB-4mini;
Сервомотор: KRS-3301×16 штук;
Аккумулятор: 6Н-800 мАч Ni-MH;
Зарядное устройство: ВХ-32MH;
Двойной USB адаптер;
Компакт-диск :(инструкция и образцы программ);
ОС: Windows Vista (с пакетом обновления 1), Windows 7, 8, 8.1, 10;
Привод CD-ROM для установки программного обеспечения
Интерфейс: USB порт (1.1 или 2.0);
Размер: 295(В) x 197(Ш) х 107(Г)мм;
Вес: около 1100 г, включая аккумулятор.
Цена: 69 800 йен без учета налогов, что на момент опубликования статьи составляет около 36 380 рублей.

Технические характеристики KXR-L4-RK:
Части рамы из эпоксидной смолы;
Контрольная панель: RCB-4mini;
Сервомотор: KRS-3301 ×9 штук;
Аккумулятор: 6Н-800мач Ni-MH;
Зарядное устройство: ВХ-32MH
Двойной USB адаптер;
Компакт-диск : (инструкция и образец программ);
ОС: Windows Vista ( с пакетом обновления 1) Windows 7, 8, 8.1, 10;
Привод CD-ROM для установки программного обеспечения
Интерфейс: USB порт (1.1 или 2.0.)
Длина: 275(В) х 119(Ш) x 153(Д)мм
Вес: около 630 грамм, включая аккумулятор;
Цена: 45,000 йен без учета налогов, что на момент опубликования статьи составляет около 23 380 рублей.

Опциональные запчасти:
Производитель выпускает большое количество дополнительных деталей, с помощью которых можно реализовать дополнительные возможности серии KXR.

Сервомотор KRS-3301, используемый в серии KXR имеет тот же размер, что KRS-3304, который имеет крутящий момент 13.8 кгс против 7,5 кгс у KRS-3301. Поэтому, если заменить сервомотор на KRS-3304, то движения робота будут более плавными и точными, а ход более стабильным.
Информация предоставлена “BIPED ROBOT NEWS JAPAN”