Xi Cheng, ученик из Малайзии сделал свою версию знаменитой игры «Пинбол».
На столе было сделано ограждение из деревянных брусков, соединённых между собой, которые образуют почти замкнутый овал. В разрыве этого импровизированного ограждения находятся ворота и управляющий пульт с двумя флипперами.
На поле размещены неподвижные препятствия, от которых должен отскакивать шарик, и одно подвижное, которое помогает шарику перемещаться по полю.
Подвижная часть конструкции выполнена из робототехнического набора ROBOTIS DREAM.
Один двигатель задаёт скорость вращения подвижного препятствия, два остальных двигателя приводят в движение флипперы.
В качестве пульта управления используется контроллер ROBOTIS CM-150. В контроллер встроены три ИК-датчика, два из которых находятся по бокам контроллера.
Дотрагиваясь до ИК-датчиков, можно управлять двигателями, на которых закреплены флипперы.
Левый флиппер управляется с помощью левого ИК-датчика, правый флиппер с помощью правого ИК-датчика.
С помощью набора ROBOTIS DREAM, фантазии и подручным материалов была создана такая полезная конструкция, которая позволяет развивать скорость реакции и внимания.
Zi Ming любит конструировать роботов, в его столе есть несколько ящиков с разными комплектующими, которые он часто использует.
Для своего удобства он решим роботизировать свой стол и создал интересный прототип.
При создании прототипа он использовал робототехнический набор Robotis DREAM и листы картона. Получилась довольно простая, но эффективная система.
При однократном ударе по стулу, встроенный микрофон, который находится в контроллере ROBOTIS CM-150, фиксирует звук, и даёт сигнал выдвинуть правый ящик. При двух ударах по столу выдвигается левый ящик. Если по столу ударить три раза, то оба ящика задвигаются обратно.
Это очень простое, и в тоже время эффективное решение позволяет значительно облегчить жизнь, потому как такого рода систему можно использовать во многих отраслях деятельности.
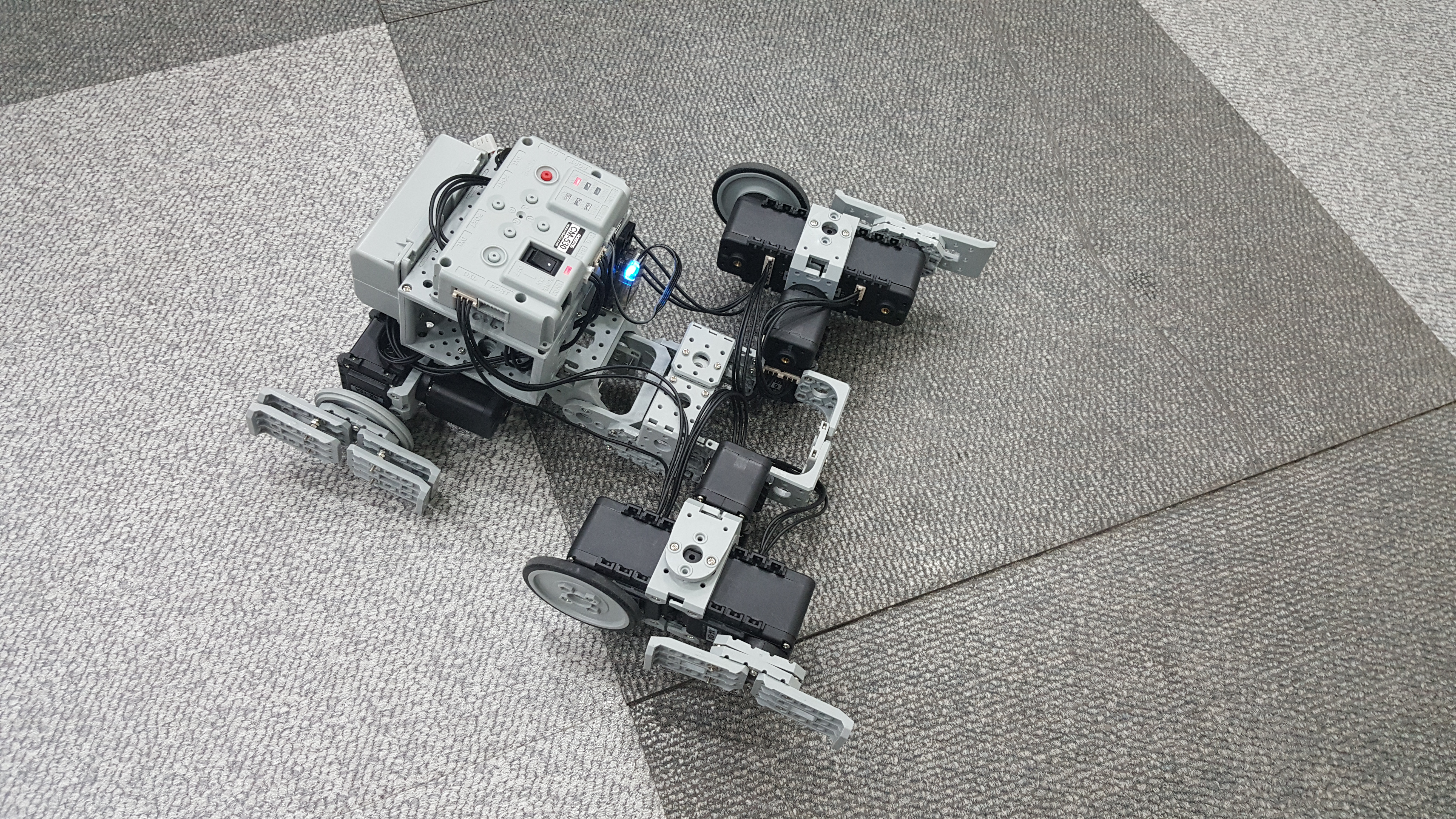
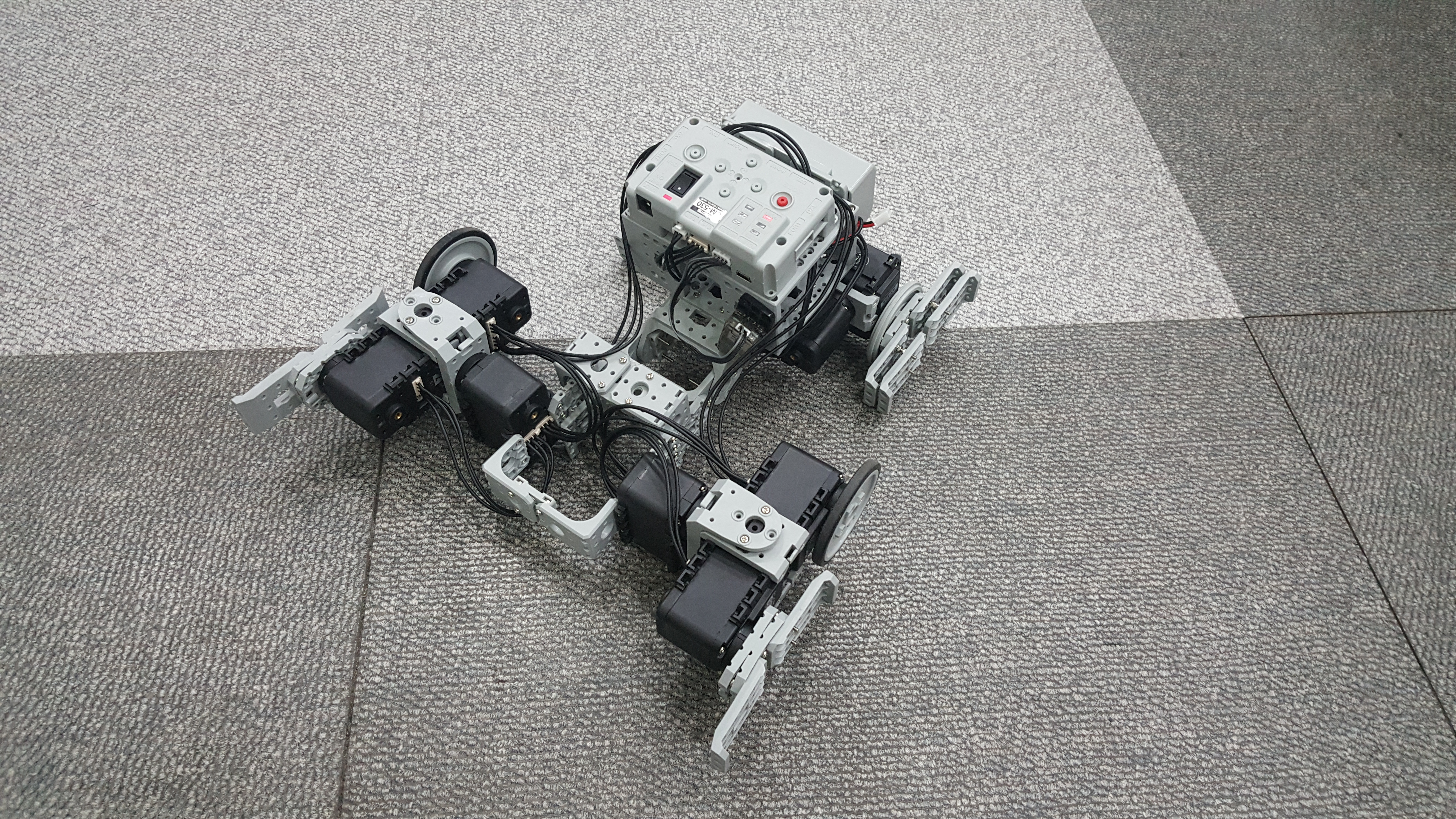
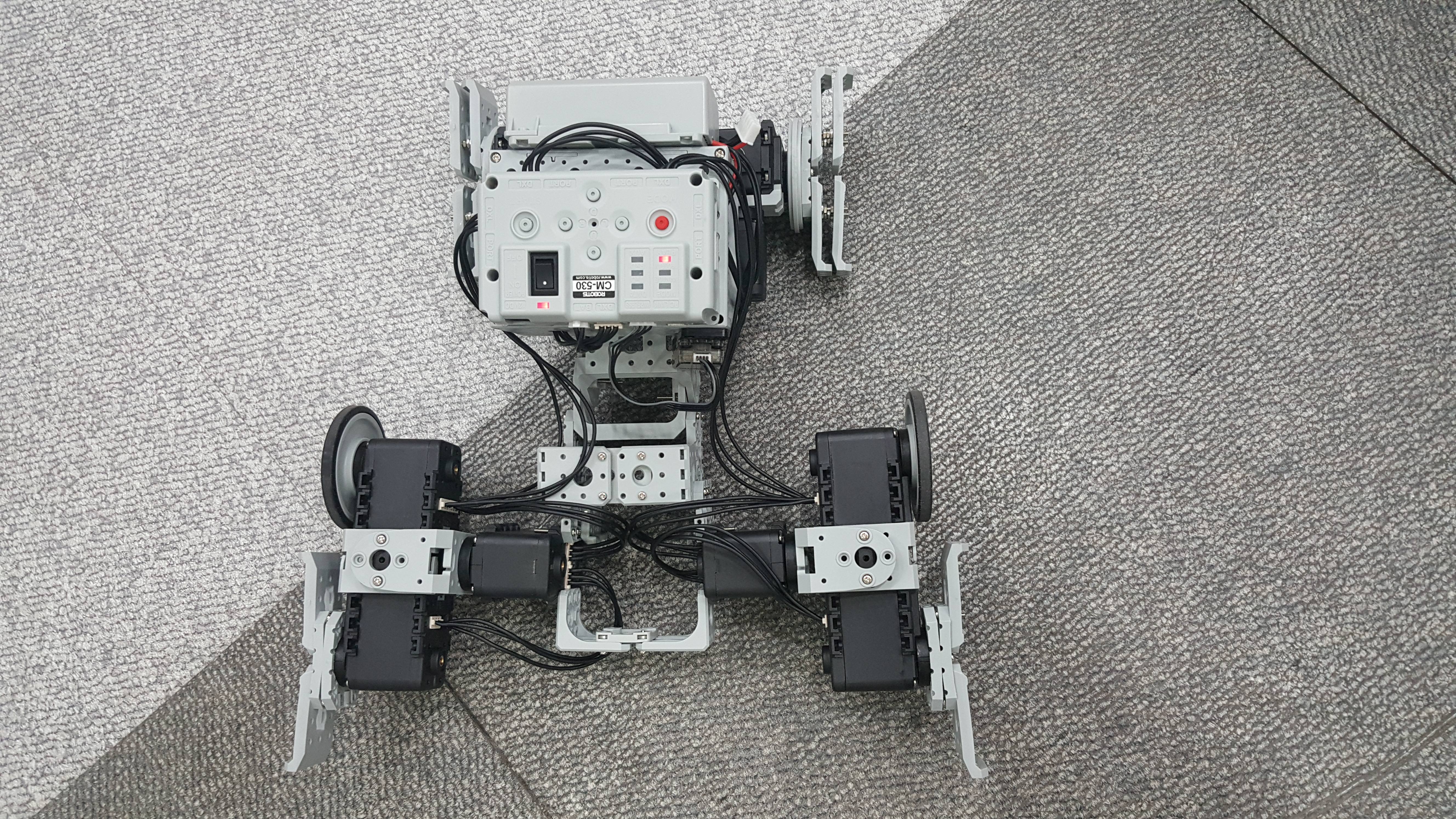
Представлен проект умного робота-уборщика на базе робототехнического набора ROBOTIS STEM.
Робот-уборщик запрограммирован таким образом, что при движении робота, если в поле зрения датчика попадает мусор, робот захватом поднимает предмет и помещает его в корзину, которая закреплена сбоку и имеет привод для удобства езды.
Создание роботов с возможностью играть на различных музыкальных инструментах имеет очень большое значение для робототехники.
Целью ученика было создать робота, способного играть на синтезаторе. Для достижения этой цели, он сконструировал робота с шестью степенями свободы.
Пять степеней свободы в пальцах и степень свободы, которая имитируется движение переноса.
В конструкции были использованы шесть сервоприводов Dynamixel AX-12A. Учеником был выбран кривошипно-шатунный механизм для преобразования вращательного движения в линейное.
Робот программируется с помощью программного обеспечения RoboPlus и контроллера Robotis CM-530.
На видео робот играет мелодию известного иранского музыкального произведения под названием “ ELLAHE-YE- NAZ ”.
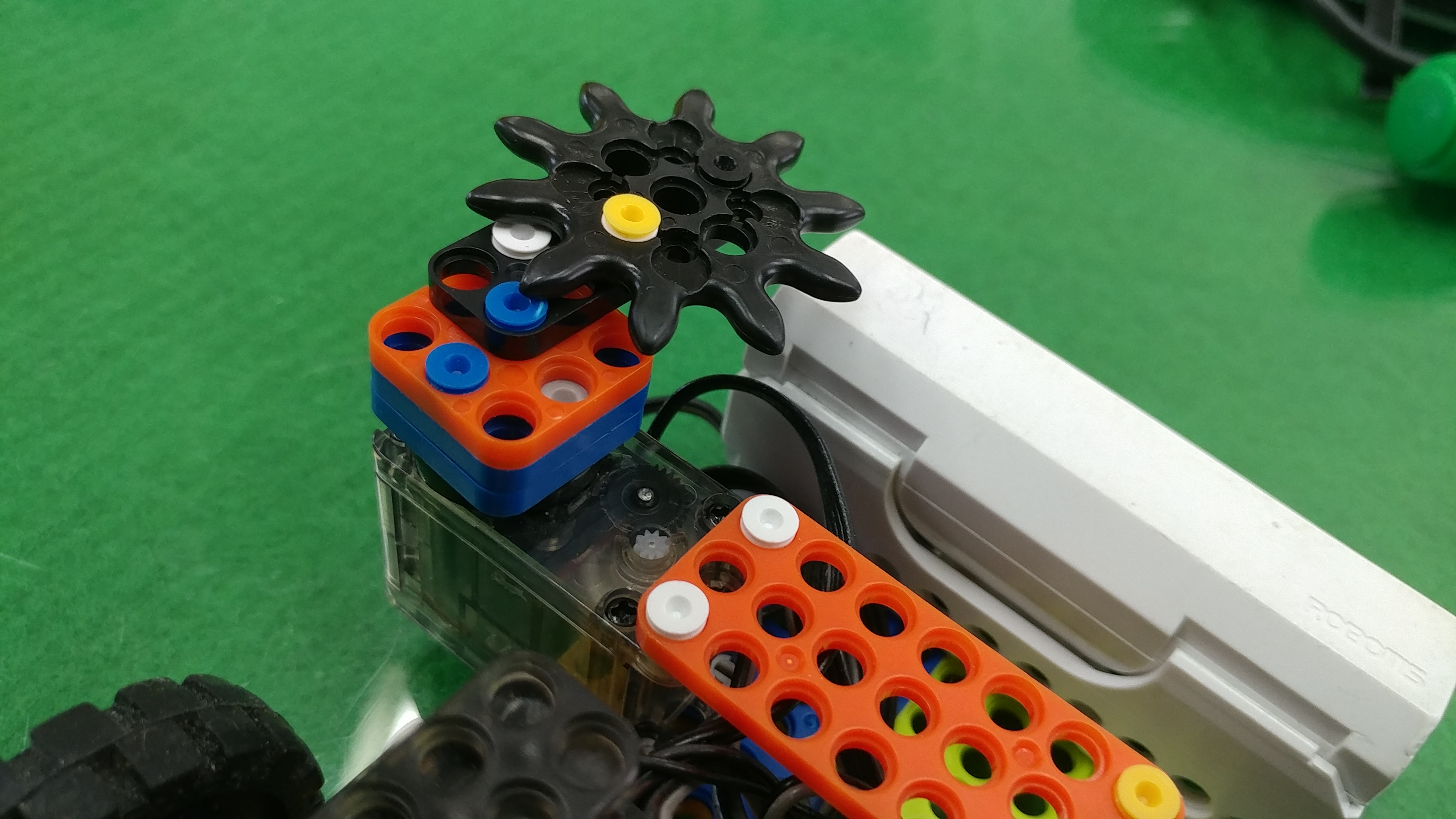
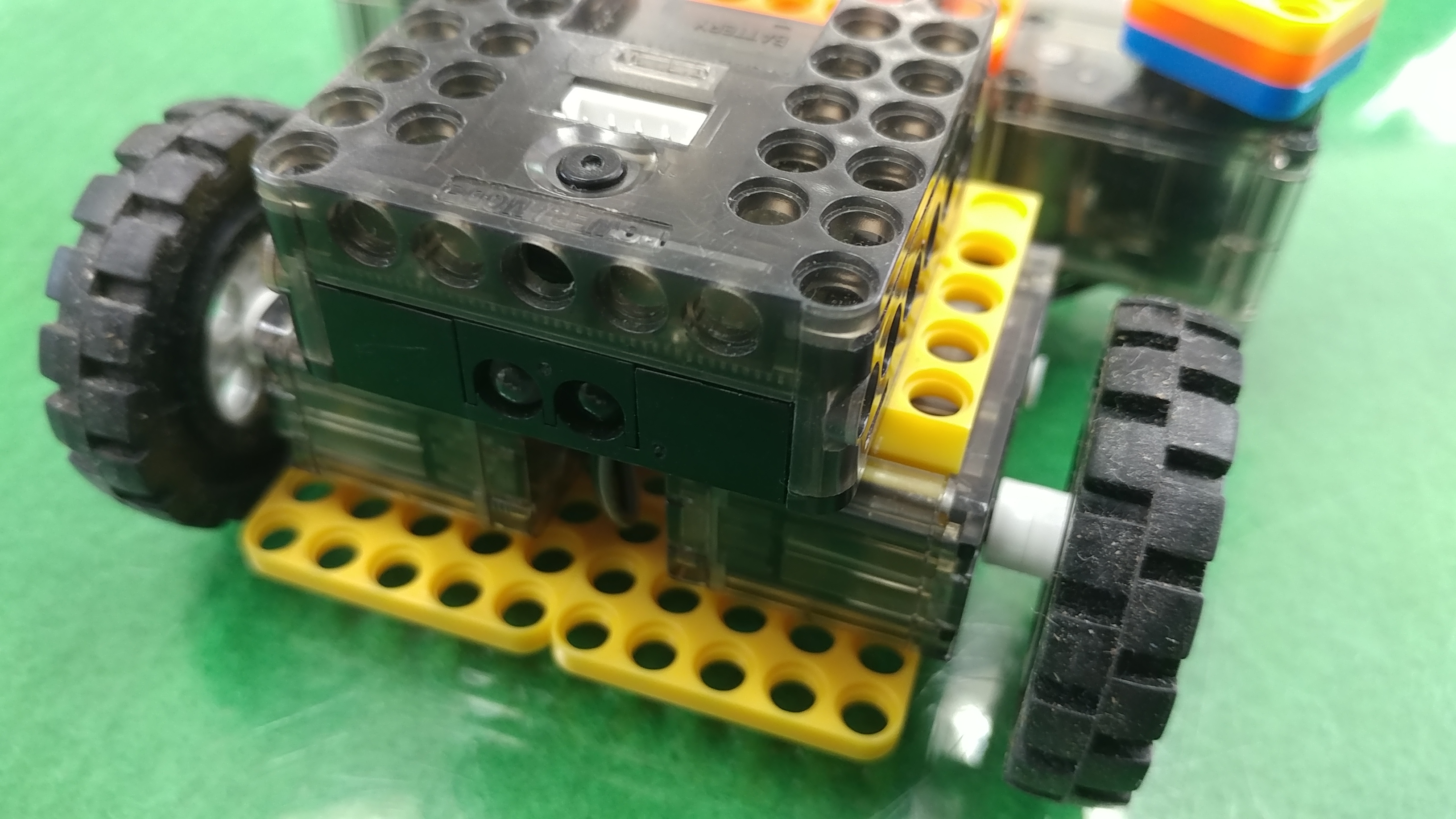
На видео представлен проект движущейся платформы, которая самостоятельно расчищает себе путь.
Для создания платформы использовались детали от набора Robotis DREAM, а именно: моторы, колёса, контроллер CM-150, аккумулятор, а также пластины и заклёпки.
Платформа движется вперёд, и благодаря встроенным ИК-датчикам в корпус контроллера, может обнаруживать препятствия. Обнаружив препятствие, платформа ускоряется и выдвигает шестерни, закреплённые на моторах, с помощью которых раздвигает и убирает препятствие, чем освобождает себе дальнейший путь.
Aston Teh, возрастом 8 лет из «roboclub_malaysia» представил проект устройства, которое сигнализирует о появлении сквозняка.
В своём устройстве он использовал набор ROBOTIS DREAM Level 2, в который входит контроллер CM-150, аккумуляторная батарея, пластины, мотор, заклёпки и провода.
Также в качестве уловителя ветра он использовал мерные ложки, которые закрепил на вращающейся платформе. В роли звукового сигнализатора выступает звонок с кнопкой нажимного действия.
Принцип действия этого устройства довольно прост: когда появляется ветер, он приводит в движение мерную ложку. Чуть ниже находится контроллер с ИК-датчиком, который направлен вверх. Как только датчик засекает движение, он даёт команду мотору, и мотор приводит в движение молоточек, который в свою очередь ударяет по звонку.
То есть, как только импровизированный флюгер приходит в движение, ИК-датчик это замечает, и молоточек ударяет по звонку.
Такое устройство будет полезно дома, где есть сквозняки, которые могут привести к заболеваниям.
Роботы параллельной структуры имеют некоторые важные особенности, такие как: как легкий вес, высокая скорость движения, большая жесткость.
Среди роботов параллельной структуры можно особо выделить роботов с шестью степенями свободы. Механизм таких роботов состоит из двух платформ, одна из которой неподвижна, а вторая подвижна. Эти платформы соединены друг с другом кривошипным механизмом.
Каждая конечность имеет на концах сферический шарнир. Робот приводится в действие шестью сервоприводами ROBOTIS Dynamixel AX-12А и управляется с помощью контроллера ROBOTIS CM-530.
Этот робот очень похож на платформу Стюарта, которая применяется в симуляторах для авиации, так и в развлекательных целях на всевозможных аттракционах, а также на станках с ЧПУ.