Друзья, встречайте соревнования партнерского направления “Motion Cup” в рамках “Турнира двух столиц” (18-19 мая)!

Возраст участников: от 10 до 18 лет.
Команда: не более 3х человек, включая руководителя.
Используемое оборудование: к соревнованиям допускаются человекоподобные роботы. Робот должен иметь голову и по две подвижные руки и ноги, не менее чем с двумя степенями подвижности в каждой.
Язык программирования: любой.
Даты проведения: 18-19 мая 2019.
Место проведения: г. Москва, поселок Совхоза имени Ленина, 21А, Инженерный корпус Школы №548.
В полюбившихся многим соревнованиях человекоподобных роботов теперь можно принять участие и на знаменитом Турнире двух столиц! Команды из всех городов России приглашаются в Москву на Финал Открытого Кубка Турнира двух столиц по робототехнике!
Партнерское направление «Motion Cup» Турнира двух столиц представлено двумя соревнованиями: «Танцы роботов» и «Многоборье андроидных роботов».
«Танцы роботов» (18 мая)

Конкурсное задание для участников соревнования «Танцы роботов» заключается в разработке управляющей программы человекоподобного робота, выполняющего танцевальную программу под определенную музыкальную композицию, и дальнейшем выступлении с этим танцем. Участники получают одинаковую музыкальную композицию утром первого дня соревнований, и у них есть не менее 4 часов для подготовки своего выступления.
«Многоборье андроидных роботов» (19 мая)
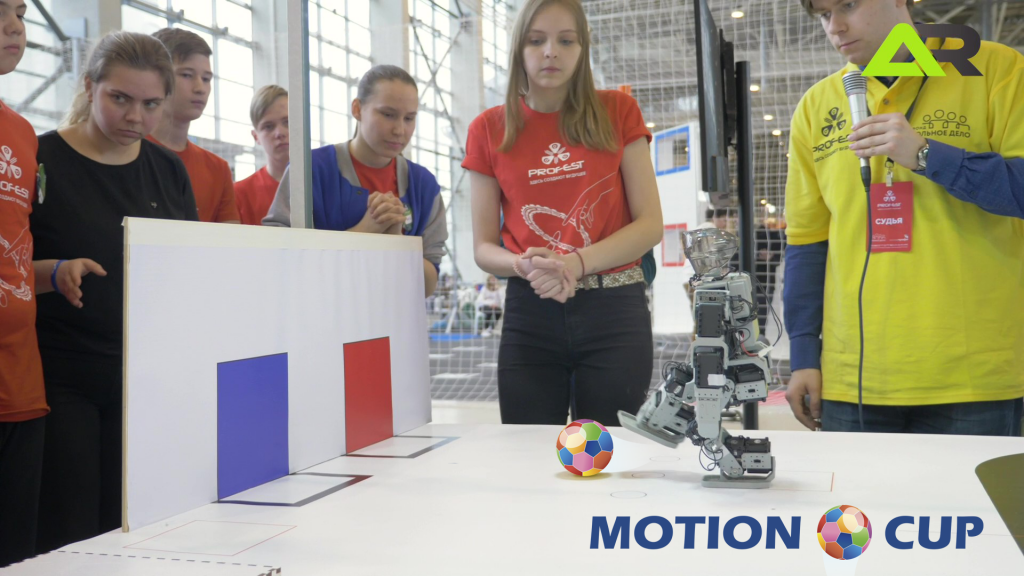
Конкурсное задание для участников соревнования «Многоборье андроидных роботов» заключается в разработке управляющей программы человекоподобного робота, способного за отведенное время преодолеть наибольшее число зон соревновательного полигона с различными типами заданий. На полигоне робот находится в поле зрения оператора, поэтому возможно использование дистанционного управления роботом. Но наиболее приветствуется автономное прохождение препятствий, в т.ч. с использованием элементов технического зрения. Участники сами выбирают стратегию прохождения роботом каждой из зон полигона – автономно или с использованием дистанционного управления.
Видеоролики с выступлениями участников предыдущих соревнований направления «Motion Cup» можно посмотреть на официальном YouTube-канале организатора направления — ассоциации MotionCup.
Все вопросы по соревнованию можно задать по почте info@motioncup.ru. Следите за новостями на сайте Турнира и в группе Motion Cup в Vk.
Регистрация на направление “Motion Cup” доступна через следующую форму.
Upd:
–> Регламент соревнования “Танцы роботов”
–> Регламент соревнования “Многоборье андроидных роботов”
Участникам соревнования предлагаются карточки с судейскими баллами за выступления их команд для анализа сильных и слабых сторон выступлений:
–> Результаты соревнования и карточки команд





