Представлен проект умного робота-уборщика на базе робототехнического набора ROBOTIS STEM.
Робот-уборщик запрограммирован таким образом, что при движении робота, если в поле зрения датчика попадает мусор, робот захватом поднимает предмет и помещает его в корзину, которая закреплена сбоку и имеет привод для удобства езды.
Создание роботов с возможностью играть на различных музыкальных инструментах имеет очень большое значение для робототехники.
Целью ученика было создать робота, способного играть на синтезаторе. Для достижения этой цели, он сконструировал робота с шестью степенями свободы.
Пять степеней свободы в пальцах и степень свободы, которая имитируется движение переноса.
В конструкции были использованы шесть сервоприводов Dynamixel AX-12A. Учеником был выбран кривошипно-шатунный механизм для преобразования вращательного движения в линейное.
Робот программируется с помощью программного обеспечения RoboPlus и контроллера Robotis CM-530.
На видео робот играет мелодию известного иранского музыкального произведения под названием “ ELLAHE-YE- NAZ ”.
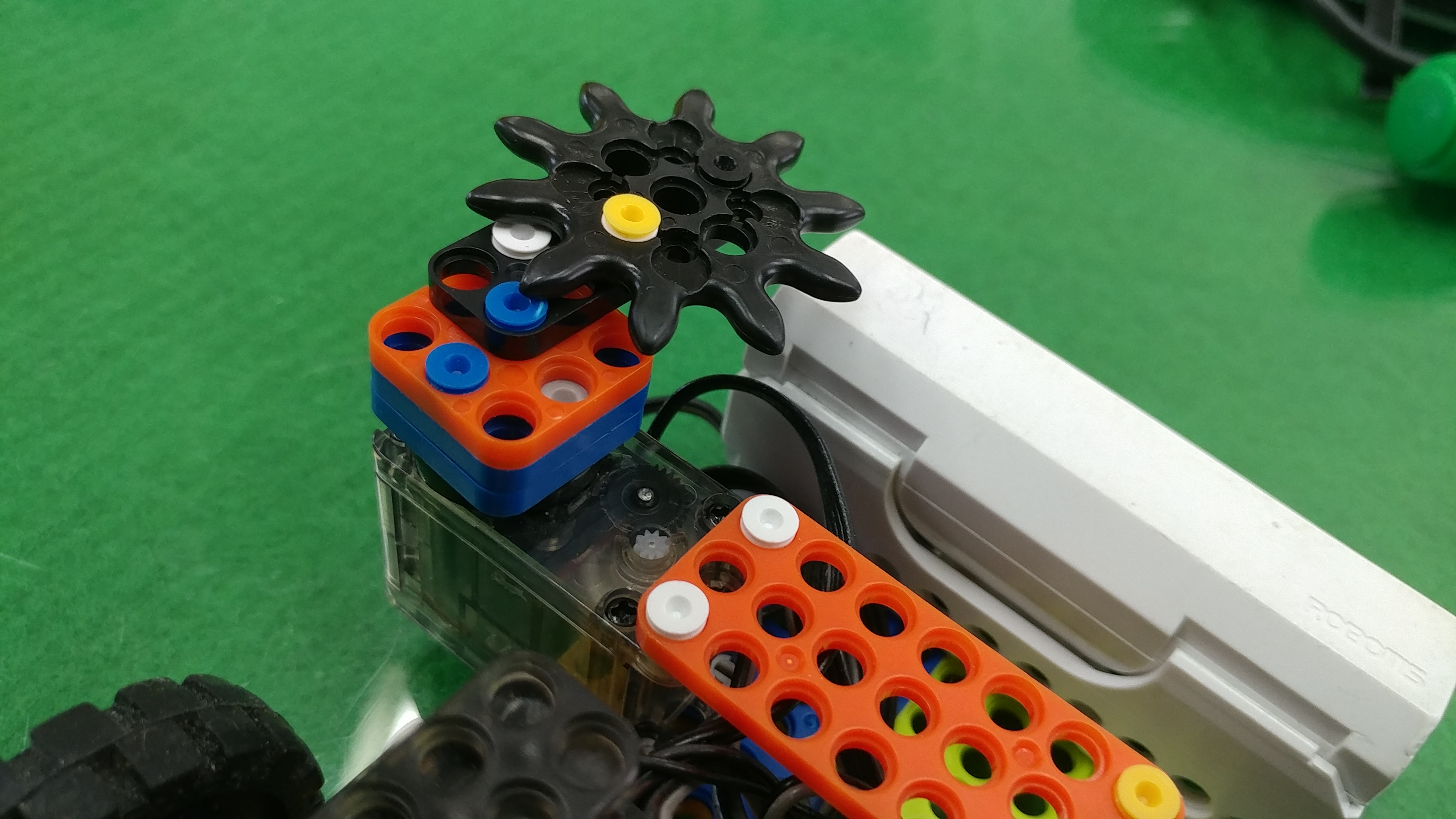
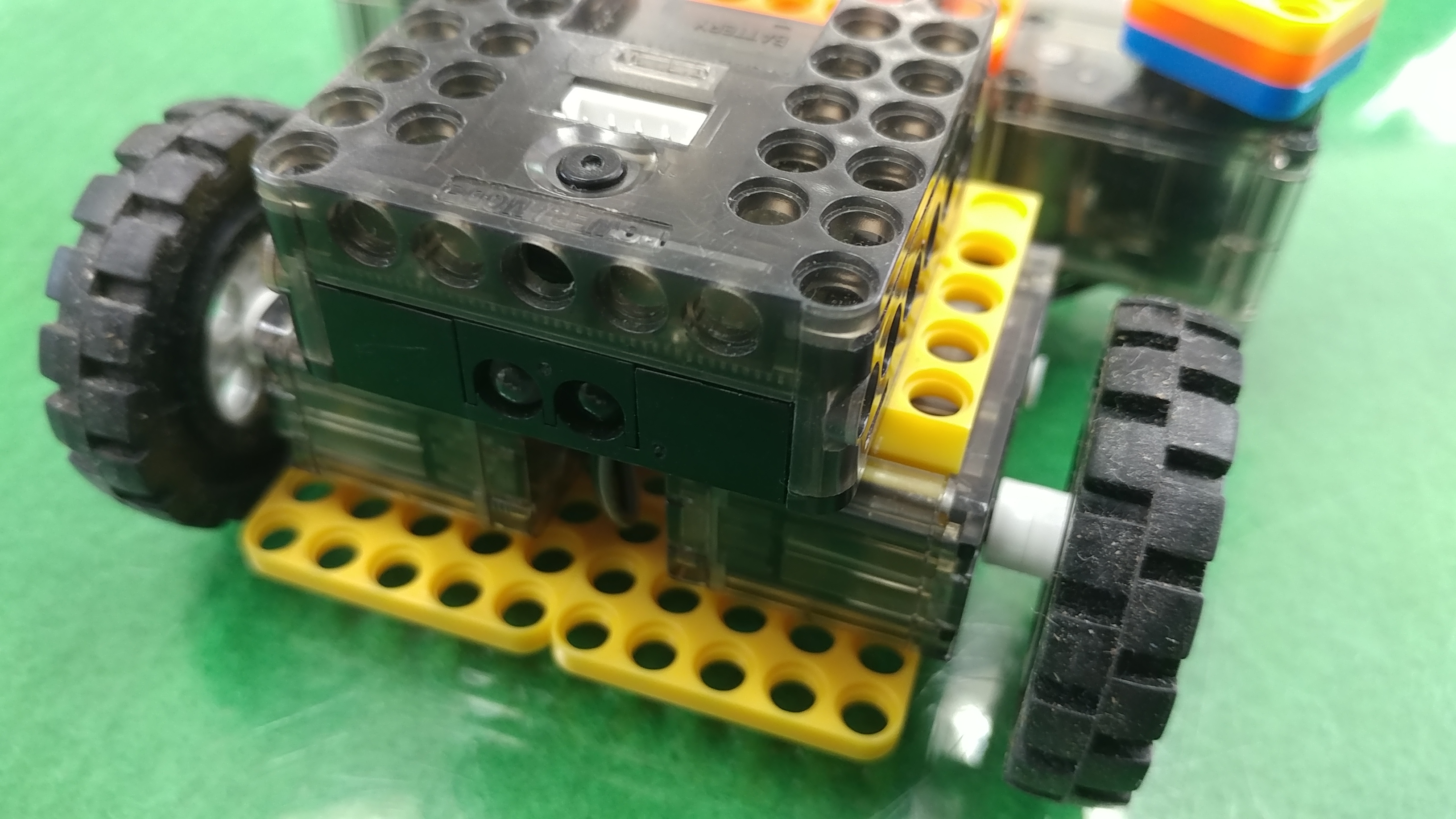
На видео представлен проект движущейся платформы, которая самостоятельно расчищает себе путь.
Для создания платформы использовались детали от набора Robotis DREAM, а именно: моторы, колёса, контроллер CM-150, аккумулятор, а также пластины и заклёпки.
Платформа движется вперёд, и благодаря встроенным ИК-датчикам в корпус контроллера, может обнаруживать препятствия. Обнаружив препятствие, платформа ускоряется и выдвигает шестерни, закреплённые на моторах, с помощью которых раздвигает и убирает препятствие, чем освобождает себе дальнейший путь.
Роботы параллельной структуры имеют некоторые важные особенности, такие как: как легкий вес, высокая скорость движения, большая жесткость.
Среди роботов параллельной структуры можно особо выделить роботов с шестью степенями свободы. Механизм таких роботов состоит из двух платформ, одна из которой неподвижна, а вторая подвижна. Эти платформы соединены друг с другом кривошипным механизмом.
Каждая конечность имеет на концах сферический шарнир. Робот приводится в действие шестью сервоприводами ROBOTIS Dynamixel AX-12А и управляется с помощью контроллера ROBOTIS CM-530.
Этот робот очень похож на платформу Стюарта, которая применяется в симуляторах для авиации, так и в развлекательных целях на всевозможных аттракционах, а также на станках с ЧПУ.
Both Jun Onn и Kah Ming из «roboclub_malaysia» представили проект конвейера с двумя роботизированными руками.
Первая рука с захватом забирает предмет и переносит его на вторую руку, которая является платформой. Далее, вторая рука-платформа переносит эту деталь дальше и сбрасывает её с платформы.
При сборке робота были использованы части от робототехнического конструктора Robotis DREAM, такие как: два контроллера CM-150, шесть моторов, два аккумулятора и пластины с заклёпками. Точность позиционирования рук возможна благодаря встроенным в контроллер ИК-датчикам.
За работу конвейера отвечают два контроллера CM-150, которые управляют шестью моторами захватов.
По сути, ребята собрали модель реального конвейера, который используется на производстве.
11 летний ученик Goh Jun Guan из robotclub_malaysia представил свой проект кораблика.
Его отец купил ему игрушечный кораблик, но он не мог двигаться на воде. Было принято решение сделать так, чтобы он мог спокойно плыть и не тонуть.
Для этого был использованы детали из робототехнического набора Robotis DREAM, такие как мотор, пластины, заклёпки, аккумулятор и переключатель.
Теперь кораблик может плыть как вперёд, так и назад.
Используя второй мотор и ИК-приёмник с пультом ДУ RC-100B или Bluetooth-приёмник, можно сделать кораблик, который будет иметь возможность полного дистанционного управления.
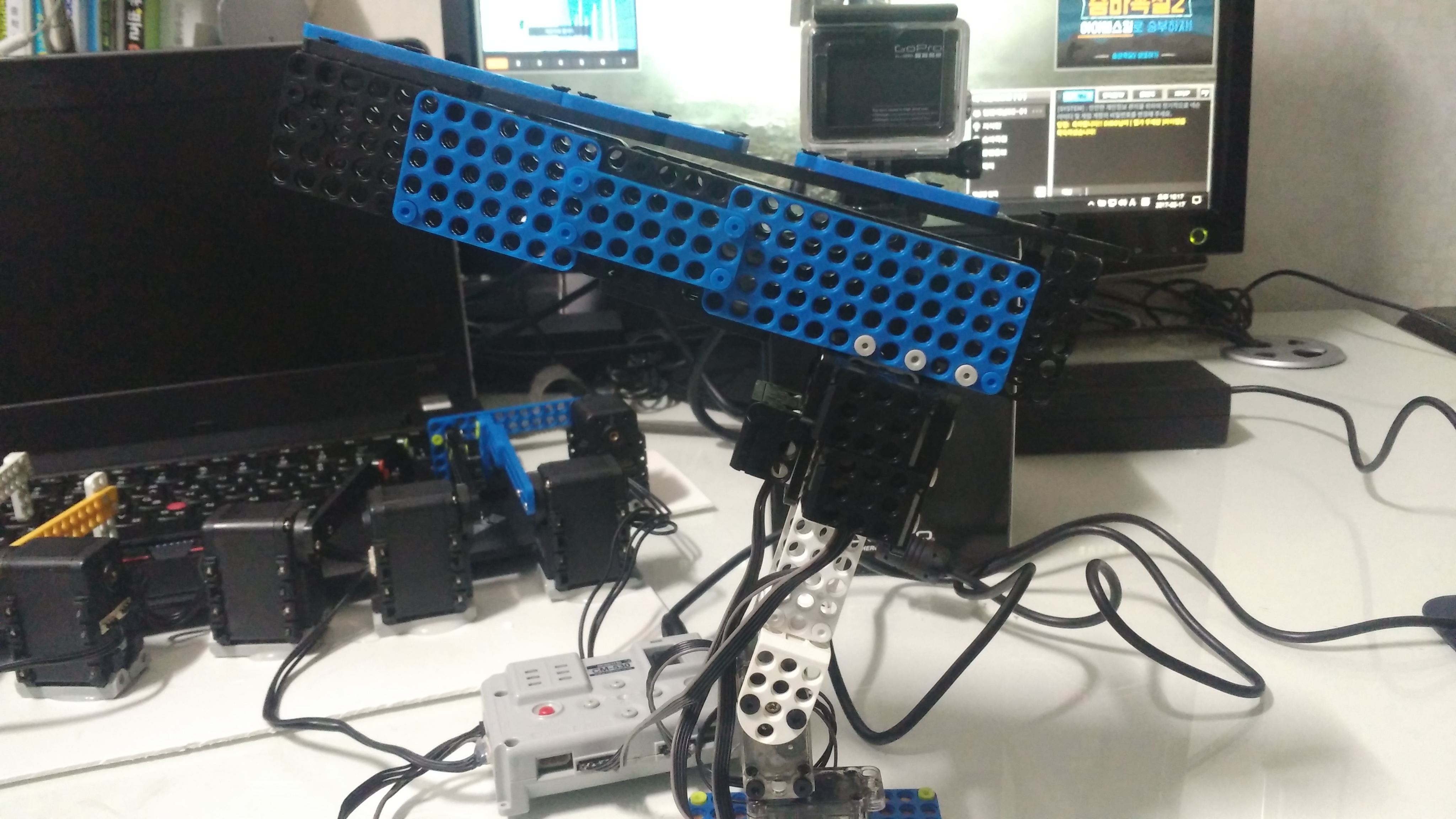
Отличный проект, который позволяет ещё успешнее погрузиться в компьютерную игру на ноутбуке, где размер клавиатуры не позволяет полноценно использовать её функционал.
В проекте использованы пластины от робототехнического конструктора компании Robotis, 7 сервоприводов Robotis Dynamixel AX-12A и контроллер CM-530. Питание устройства осуществляется с помощью блока питания, который подключается к контроллеру.
Каждый сервопривод отвечает за свою клавишу. Контроллер позволяет подключить столько сервоприводов, что каждая клавиша на клавиатуре может быть под контролем.
С помощью этого джойстика можно управлять передвижением вперёд-назад, влево-вправо, а также задействовать и другие клавиши, например отвечающие за стрельбу.
Такой проект может быть началом чего-то более грандиозного и сложного в будущем.
Проект беспроводного управления освещением через Bluetooth.
В проекте показано, как имея минимум деталей, собрать устройство для беспроводного управления освещением со смартфона или планшета.
Само устройство, которое крепится на выключатель, состоит из контроллера ROBOTIS CM-150, Bluetooth-приёмника ROBOTIS BT-210, сервомотора, датчика касания, пластин и аккумулятора из набора ROBOTIS DREAM.
Принцип действия устройства довольно прост. Мотор соединён с пластиной, которая в свою очередь может нажимать на тот или иной край выключателя, в зависимости от того, в какую сторону вращается мотор.
Управление мотором происходит посредством Bluetooth с помощью официальной программы от компании ROBOTIS, а также с помощью пульта ДУ RC-100 с установленным в него модулем Bluetooth.
Также контроллер позволяет запрограммировать работу мотора с задержкой, а возможность подключения различных датчиков позволяет сделать устройство, которое будет включать и гасить свет при необходимости.
В итоге мы имеем отличное устройство для квартиры, склада и иных помещений, где будет высоко оценено такое решение, как свободные руки.
Ниша и Лин Фенг из «roboclub_malaysia» представили проект самоходной рогатки для игры в боулинг. Возраст участников – 15 лет.
При проектировании этого робота ребята использовали программу ROBOTIS R+Design, которая позволяет строить 3D-модель и облегчать сборку. На это им потребовалось около 4 дней.
Использование программы ROBOTIS R+Design позволило им неоднократно собирать свой проект.
Робот собран из набора ROBOTIS DREAM.
При помощи программируемого контроллера робот умеет следовать по линии и в нужный момент отпускать натянутую резинку, которая толкает мяч, предварительно закреплённый на специальной площадке.